BBall Bot
Overview
This design competition scored the ability for a robot to shoot baskets from a variety of points on the court, free throws, and autonomous aiming. The constraints of this project were that the robot must have some anatomical relation to human linkages, meaning that there could not be any joints that move outside of a human range of motion, such as 360 degree joint rotation or flywheels.
Design
To mimic the anatomical form of a human arm, we designed our robot to have a hand, wrist, and forearm. The forearm is actuated by a pneumatic piston. The wrist angle was designed to be adjustable but does not actuate during the throw.
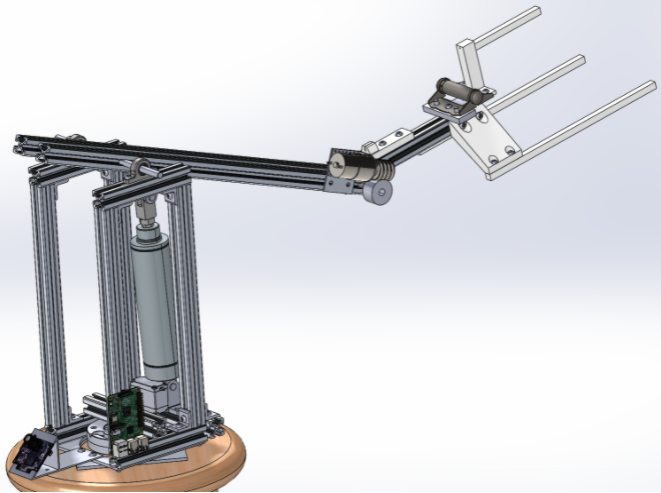
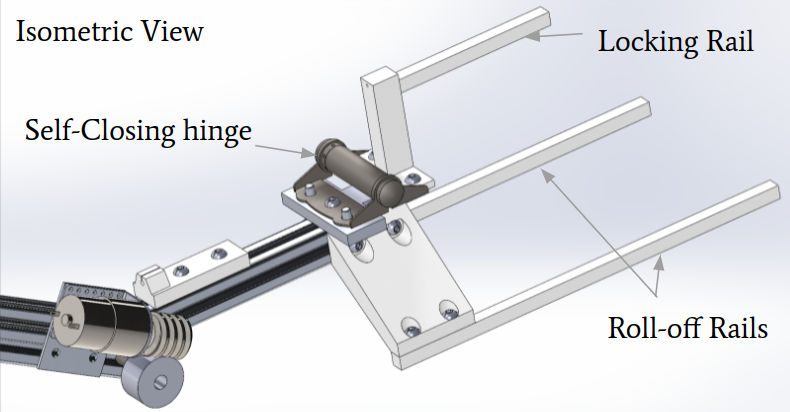
My hand gripper was designed to release the ball at an exact point of the throw using a bicycle break cable system to release the ball when actuated. The cable system actuated the gripper using the tension force between a different portion of the arm and could be mounted in different locations allowing the point of release to be adjustable.
Build
Starting with a barstool as a base, we make the main piston actuated arm out of 80/20 components. We made the remaining portion of the arm out of lightweight carbon fiber to reduce the weight and inertial load. The gripper, originally designed with 80/20 components, was redesigned with 3d printed components and carbon fiber tubes to reduce inertial load as well.

The actuation of the pneumatic piston was powerful and heavy enough to require over 100kg of added weight to the base of the robot. Without the weight, the robot would flip on its head during actuation.
Aiming
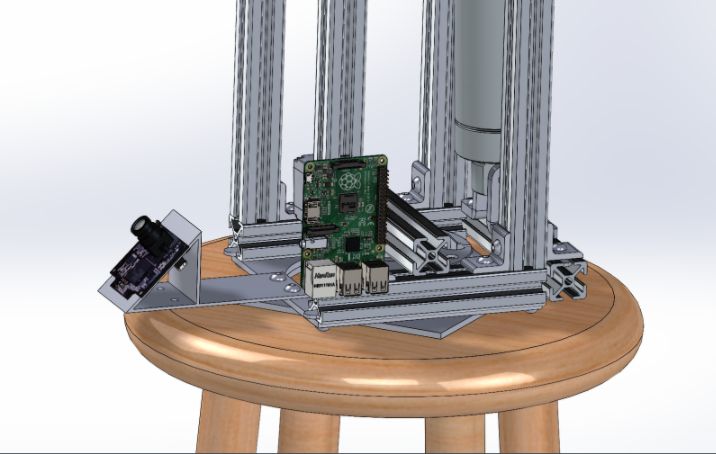
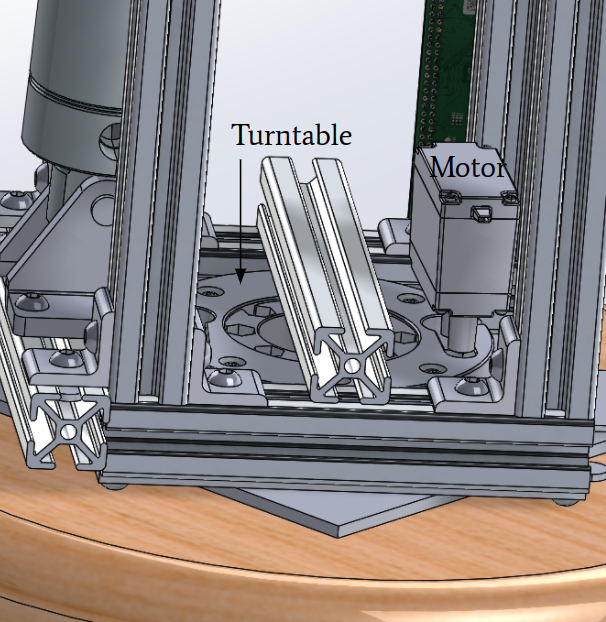
The camera system for the robot used color recognition to detect the backboard. A raspberry Pi calculated the desired trajectory of the ball and actuated a motor that drove a turntable, rotating the entire mechanism in the yaw axis.
Results
In competition, our robot resulted in making 7 out of 10 baskets from the freethrow line. We won the robot comptetition against our competitors who only made 1 basket.
Team Members
Chris Heiny, Josh Walker, David Krouse, Davin Landry

After the competition, we set up the robot at the halfcourt line for this video of a successful halfcourt shot.
