Robot Design Studio 2024: Haptic Finger/Thumb Gripper
Led a class of students to develop a finger/thumb gripper with wearable haptic interface to conduct chemistry experiements within a hazardous hotbox environment.
Led a class of students to develop a finger/thumb gripper with wearable haptic interface to conduct chemistry experiements within a hazardous hotbox environment.
Led a team of students to rebuild and improve the Omnid Mocobots for the MARS 2024 Conference hosted by Jeff Bezos.
Led a capstone course to develop an anthropomorphic robot arm with series elastic actuators for dexterous manipulation
Hands-on lead of Northwestern’s CRB Makerspace, enabling rapid prototyping and research through expert guidance, tool maintenance, and real-time problem solving.
Created and tested new feet designs on the Robotis OP3 Robot to compare the efficiency of flat footed walking and human-like gaits.

I created a haptic feedback system for the IHMC's Exoskeleton for Paraplegia.

I created handheld haptic controllers for virtual reality and created a VR environment in Unity to demonstrate the devices.
I controlled a ball on a whiteboard using a Franka Panda Robot. This is a ROS project was developed as part of ME495 - Embedded Systems in Robotics course at Northwestern University.
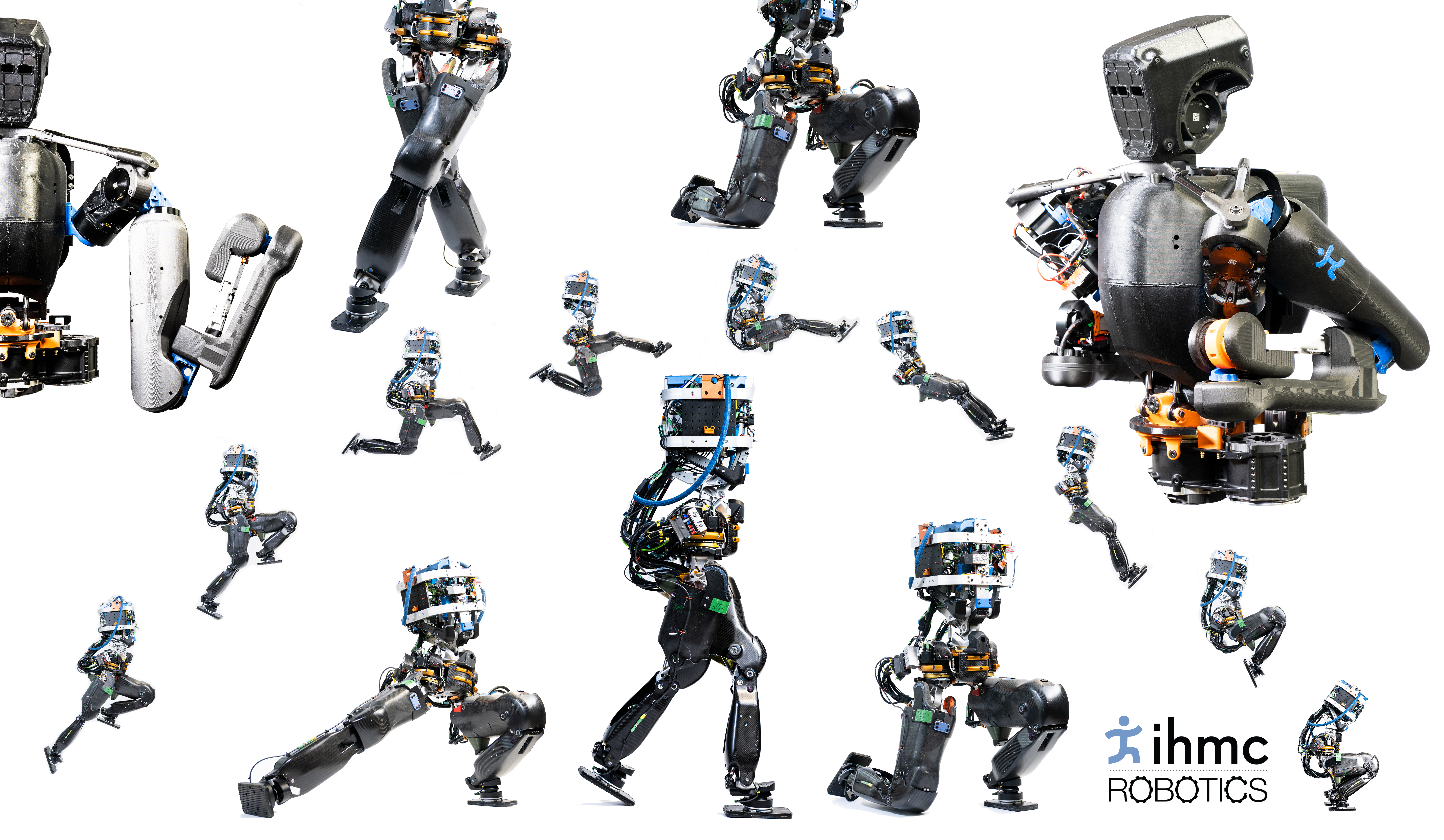
I researched and designed feet for the NADIA robot, a hydraulic powered humanoid robot in development at The Institute for Human and Machine Cognition (IHMC).
I made an interactive Redlight Greenlight game from the hit Netflix series Squid Game.
My team designed a robot to shoot basketballs as part of a senior design competition at Purdue University.
I created a bottom up controller for a quadrotor drone.
I used Python and jupyter to code the dynamics and simulation of a dice bouncing in a cup.
I created a python code to generate the joint trajectories of a Kuka robot to pick and place objects from simple input parameters.
I created a SLAM program for both simulated and real turtlebots from scratch .